← All Projects
EPQ Robotic Arm
A-Level Extended Project: 6-DOF robotic manipulator with custom harmonic drive gearboxes
Overview
Designed and manufactured a complete 6 degree-of-freedom robotic manipulator from scratch as an A-Level Extended Project Qualification (EPQ). The project received the highest grade (A*) and involved four major design iterations progressively refining the mechanical and control systems.

Key Features
- Six independent joints enabling full manipulation capability
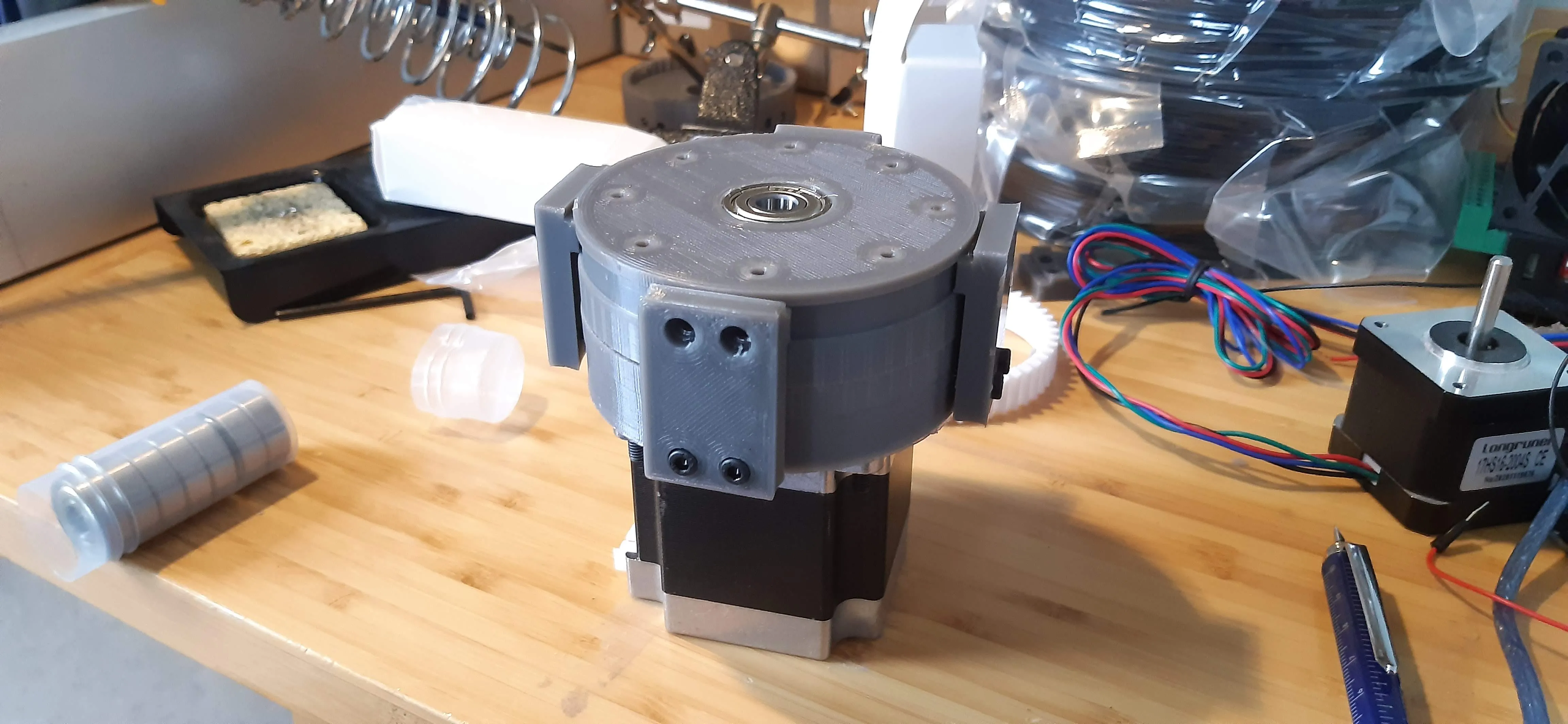
- Custom harmonic drive gearboxes achieving approximately 100:1 gear reduction
- Designed for low backlash via the strain-wave / harmonic-drive principle
- Payload capacity under 0.8kg, suited for light manipulation tasks
- Complete CAD documentation of all design iterations (Mk1-Mk4.2)
Technical Implementation
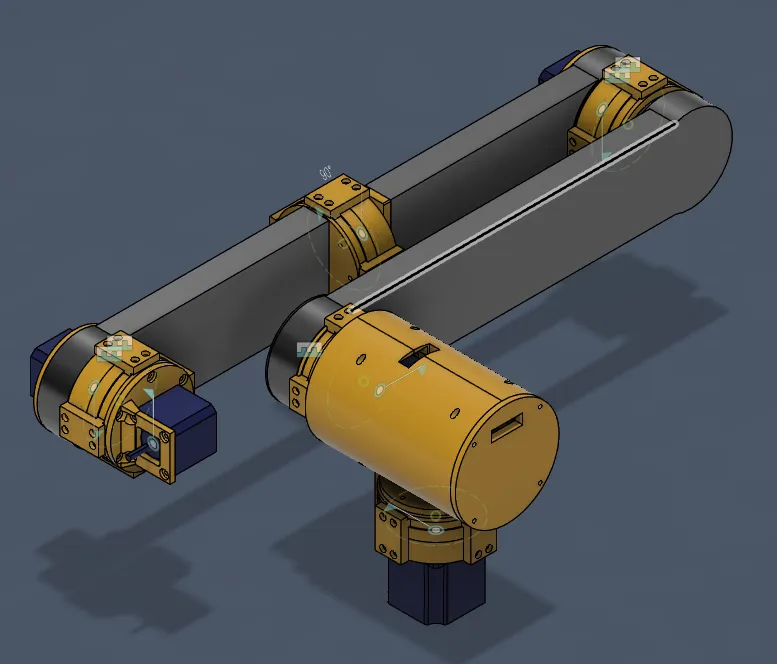
Mechanical Design
- Custom-designed strain wave gearboxes for high torque density
- 3D printed components (PLA) with recycled aluminium structural elements
- Iterative design process addressing weight and strength constraints
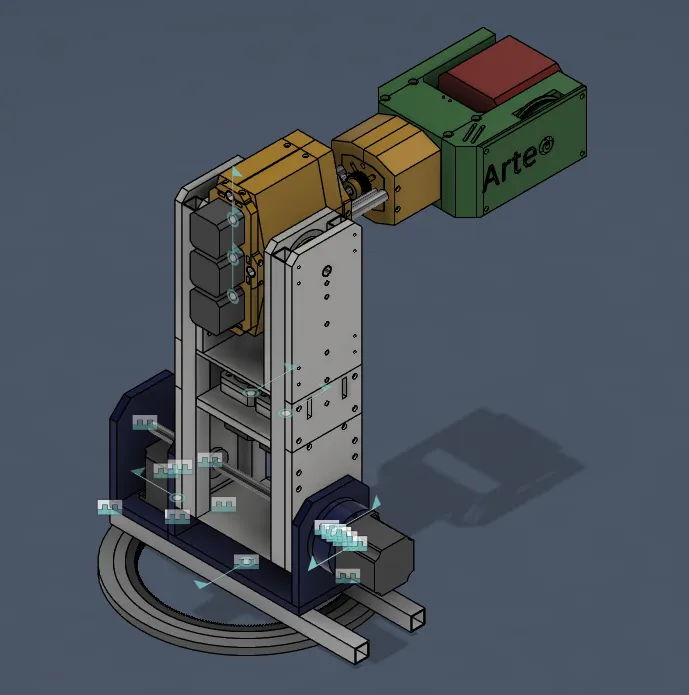
Control System
- Arduino-based motion control with NEMA 17 stepper motors
- A4988 motor drivers with AccelStepper library for smooth motion
- Serial communication enabling remote control via Python scripts
Technologies
- CAD: Autodesk Fusion 360
- Microcontroller: Arduino with C++
- Motor Control: NEMA 17 steppers, A4988 drivers
- Manufacturing: 3D printing, aluminium machining
- Communication: Serial protocols, pySerial
Design Evolution
The project progressed through four major iterations:
- Mk1: Initial proof of concept
- Mk2: Refined gearbox design
- Mk3: Weight optimisation
- Mk4.2: Final iteration with improved reliability